Pengcheng Wei(韦朋成)
Currently, I am teaching at the School of Civil Engineering and Architecture, China Three Gorges University, and I received my PhD from the School of Surveying and Mapping, Wuhan University, under the supervision of Prof. Li Yan and Prof. Hong Xie. My research interests include:
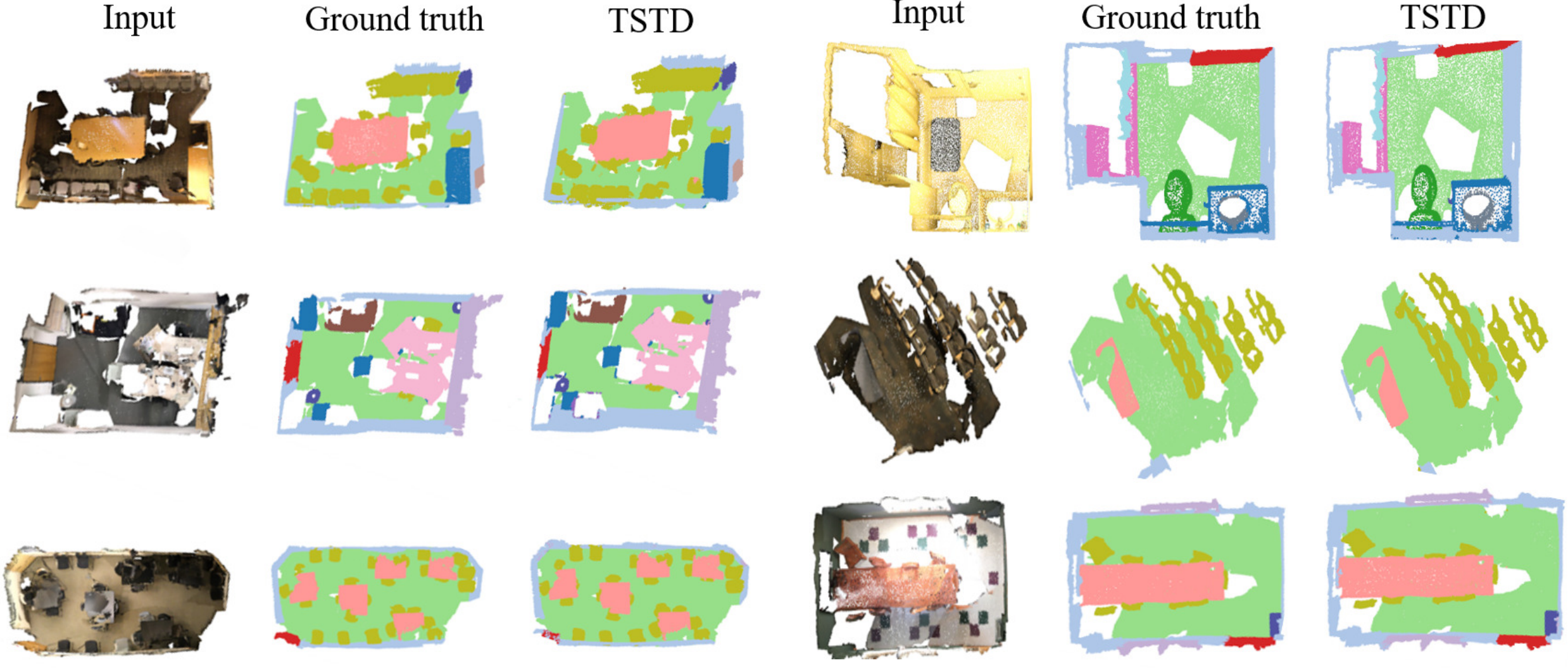
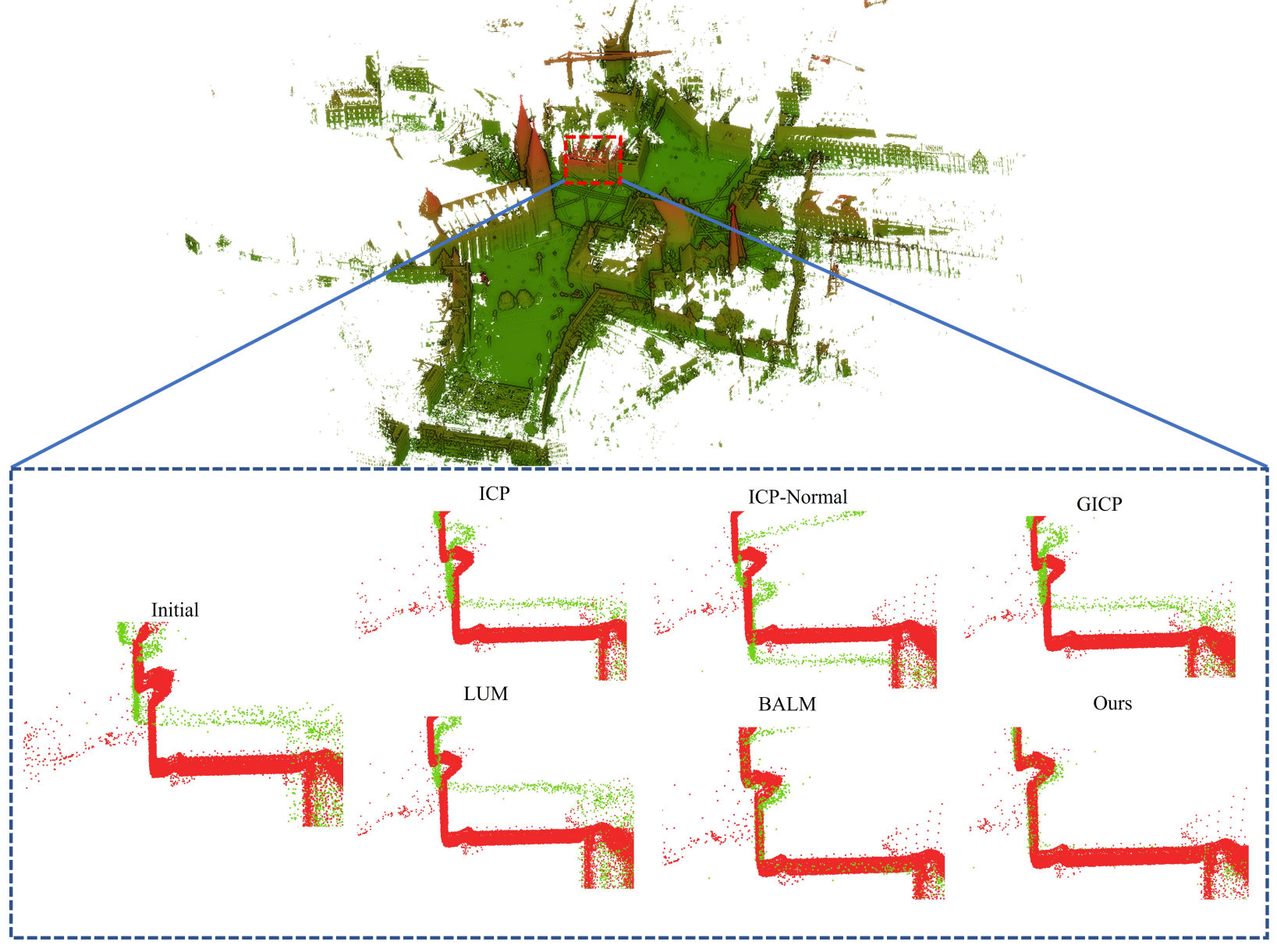
- LiDAR point cloud processing (segmentation, classification, registration, and 3D modeling)
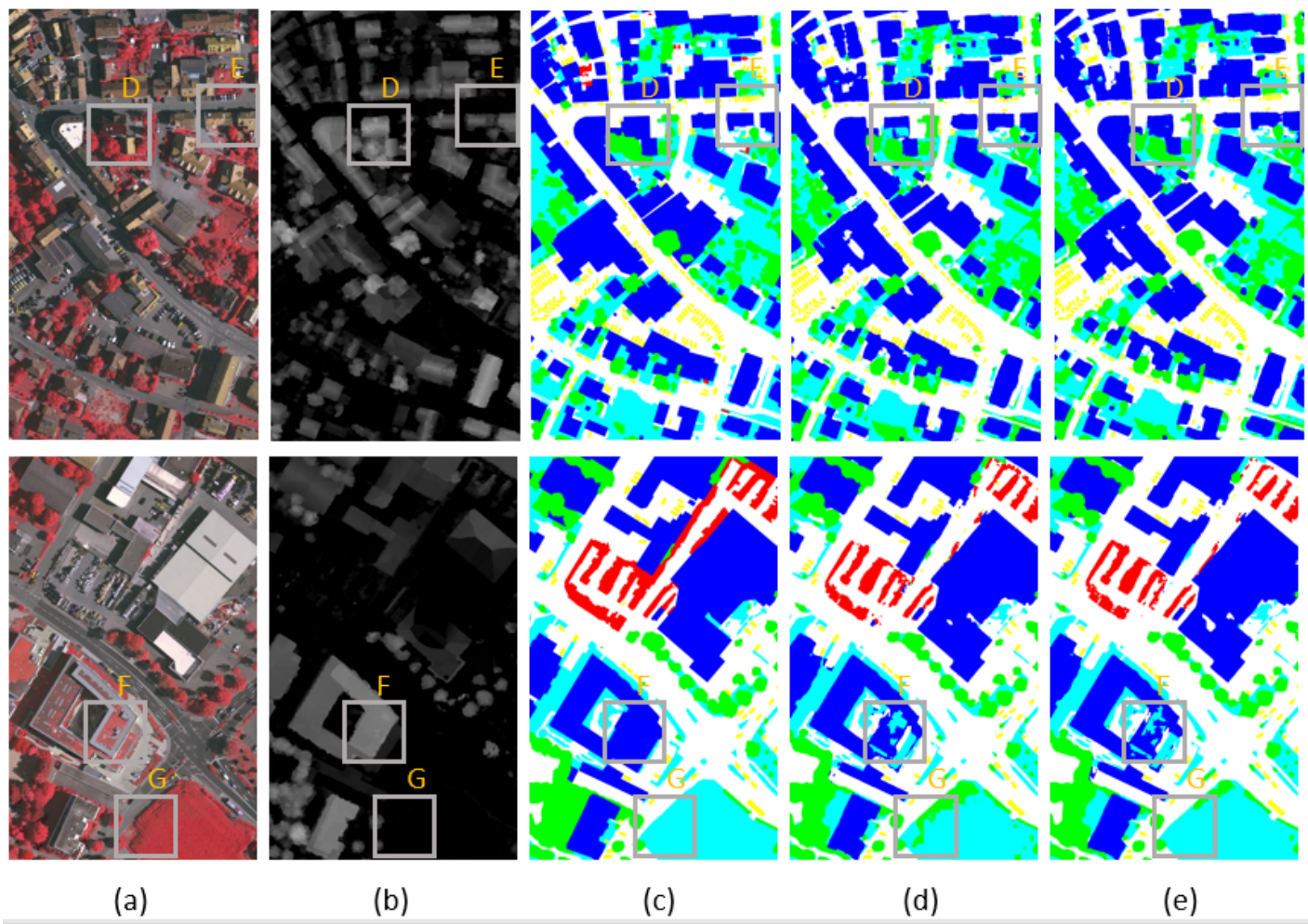
- Image processing(classification, matching, pose estimation, and multi-view reconstruction)
- Neural Radiance Fields (NeRF) reconstruction with multi-source data
- Autonomous mobile measurement robots
2025

2024
2023

2022
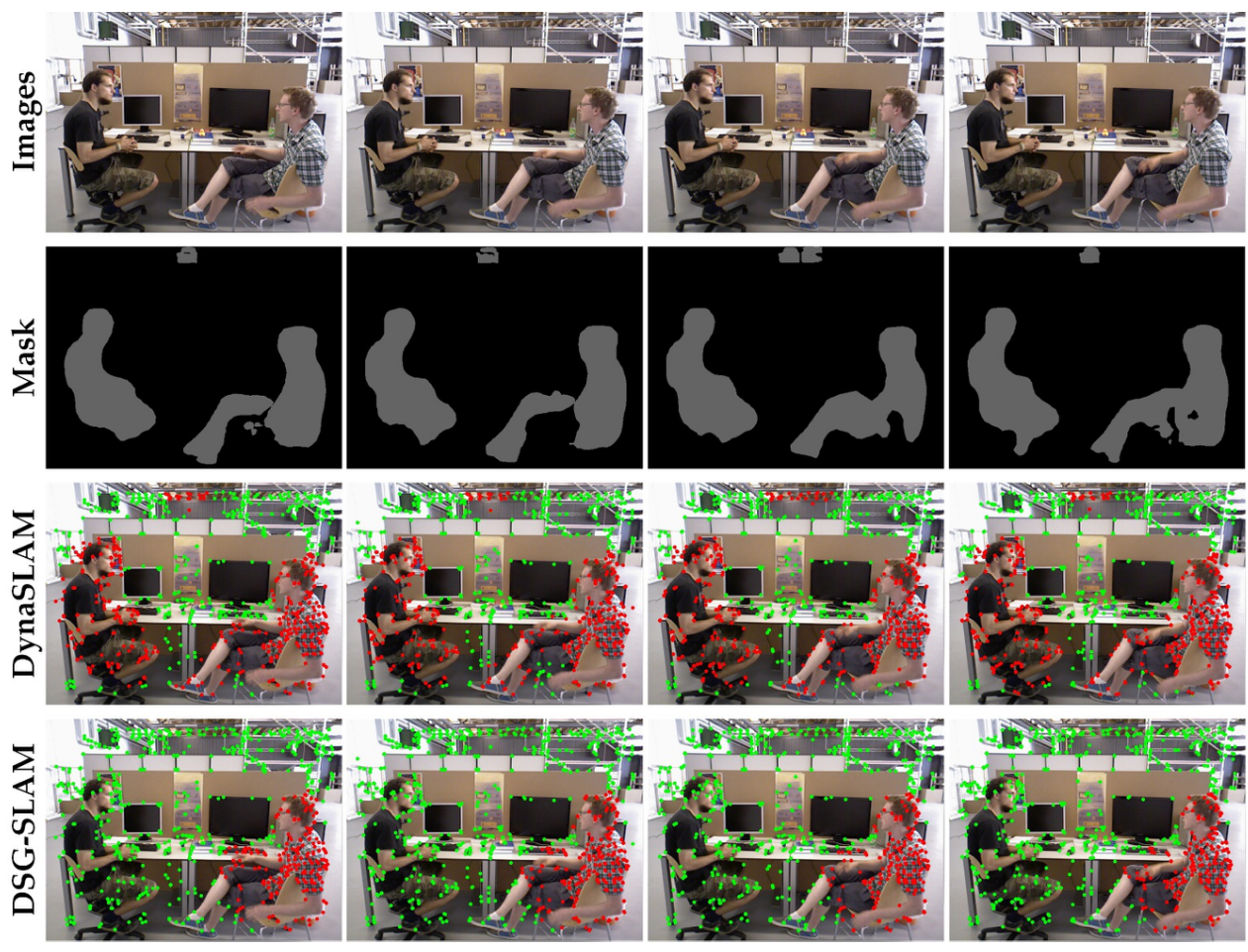
DGS-SLAM: A Fast and Robust RGBD SLAM in Dynamic Environments Combined by Geometric and Semantic Information
Remote Sensing (IF: 5.349)
[Paper]
Remote Sensing (IF: 5.349)
[Paper]
2021
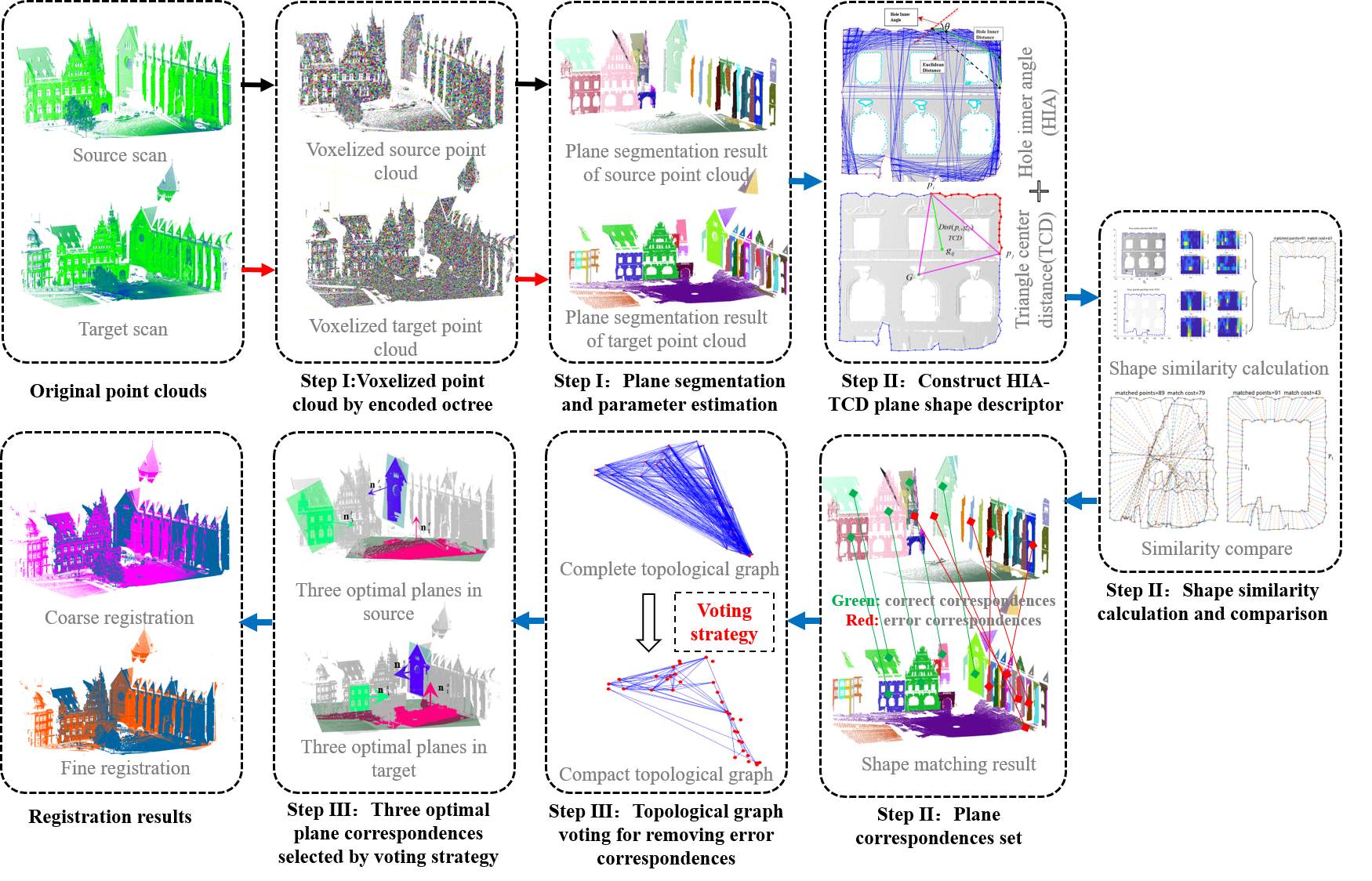
Automatic coarse registration of point clouds using plane contour shape descriptor and topological graph voting
Automation in Construction (IF: 10.517)
[Paper]
Automation in Construction (IF: 10.517)
[Paper]
2019
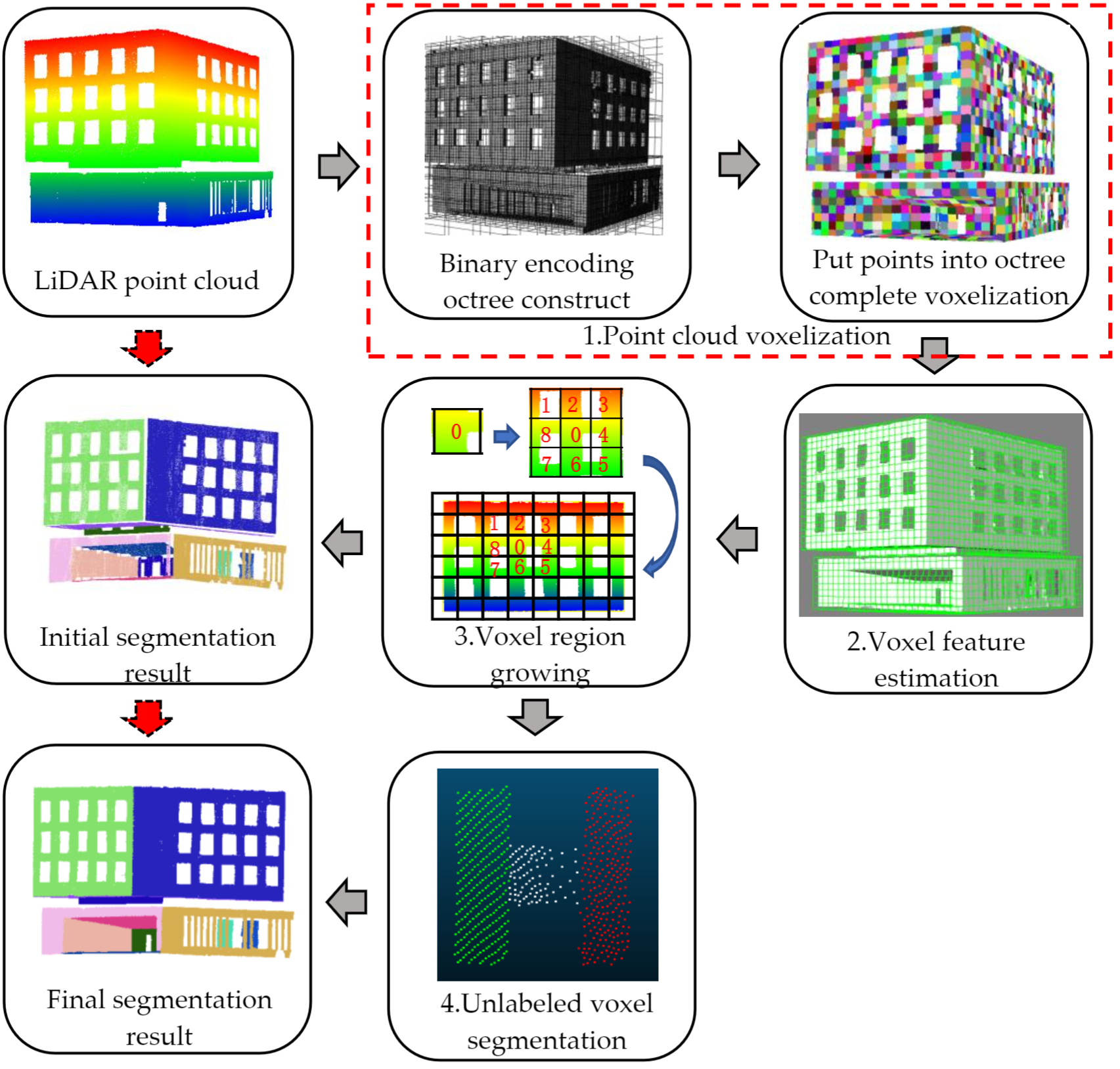
An Efficient Encoding Voxel-Based Segmentation(EVBS) Algorithm Based on Fast Adjacent VoxelSearch for Point Cloud Plane Segmentation
Remote Sensing (IF: 5.349)
[Paper]
Remote Sensing (IF: 5.349)
[Paper]